Guía Completa de Tecnologías de Navegación para Robots Móviles: ¿Cuál es la Mejor Opción para Tu Proyecto?
Con tantas opciones disponibles, desde SLAM con LiDAR 3D hasta cintas magnéticas y códigos QR 2D, cada tecnología tiene sus propias ventajas, desventajas y costos. Este artículo proporciona una guía completa sobre estas tecnologías para ayudarte a tomar la mejor decisión para tus necesidades.
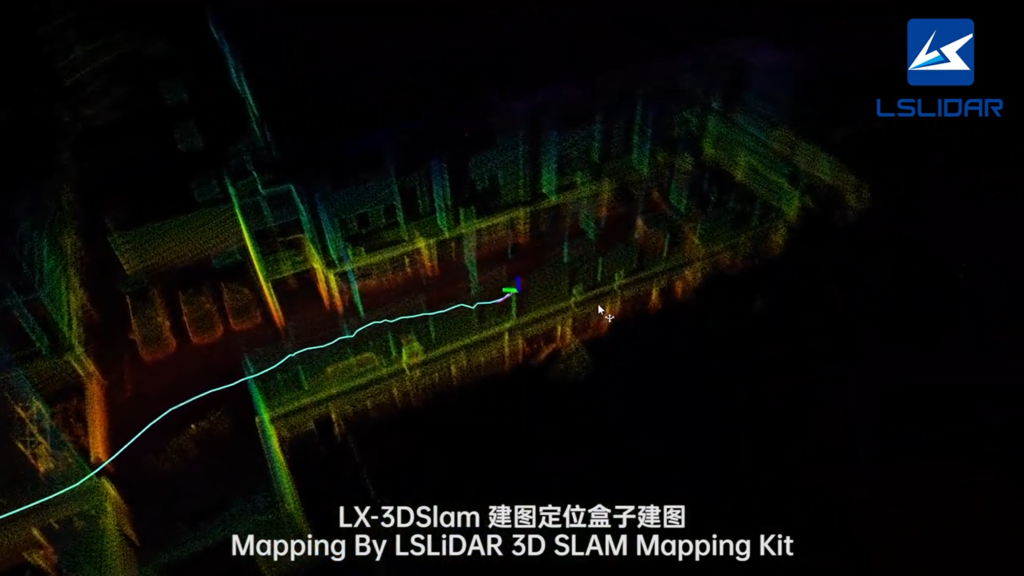
1. SLAM con LiDAR 3D: Máxima Precisión a un Costo Elevado SLAM (Simultaneous Localization and Mapping) con LiDAR 3D es una de las tecnologías más avanzadas en términos de precisión y detalle. Utiliza un sensor LiDAR 3D para generar mapas tridimensionales del entorno, permitiendo a los robots navegar en entornos complejos y dinámicos con gran exactitud. Ventajas: Alta Precisión: Ideal para entornos donde la precisión extrema es crucial. Capacidad para Entornos Complejos: Puede manejar entornos dinámicos y detallados. Desventajas: Costo Elevado: Los sensores LiDAR 3D y el hardware necesario para procesar los datos son caros. Complejidad de Procesamiento: Requiere un hardware potente para procesar grandes volúmenes de datos en tiempo real. Dependencia de Condiciones Ambientales: El rendimiento puede verse afectado por factores como polvo o interferencias ópticas. Casos de Uso: Almacenes grandes, áreas industriales y cualquier entorno que requiera una representación tridimensional precisa.
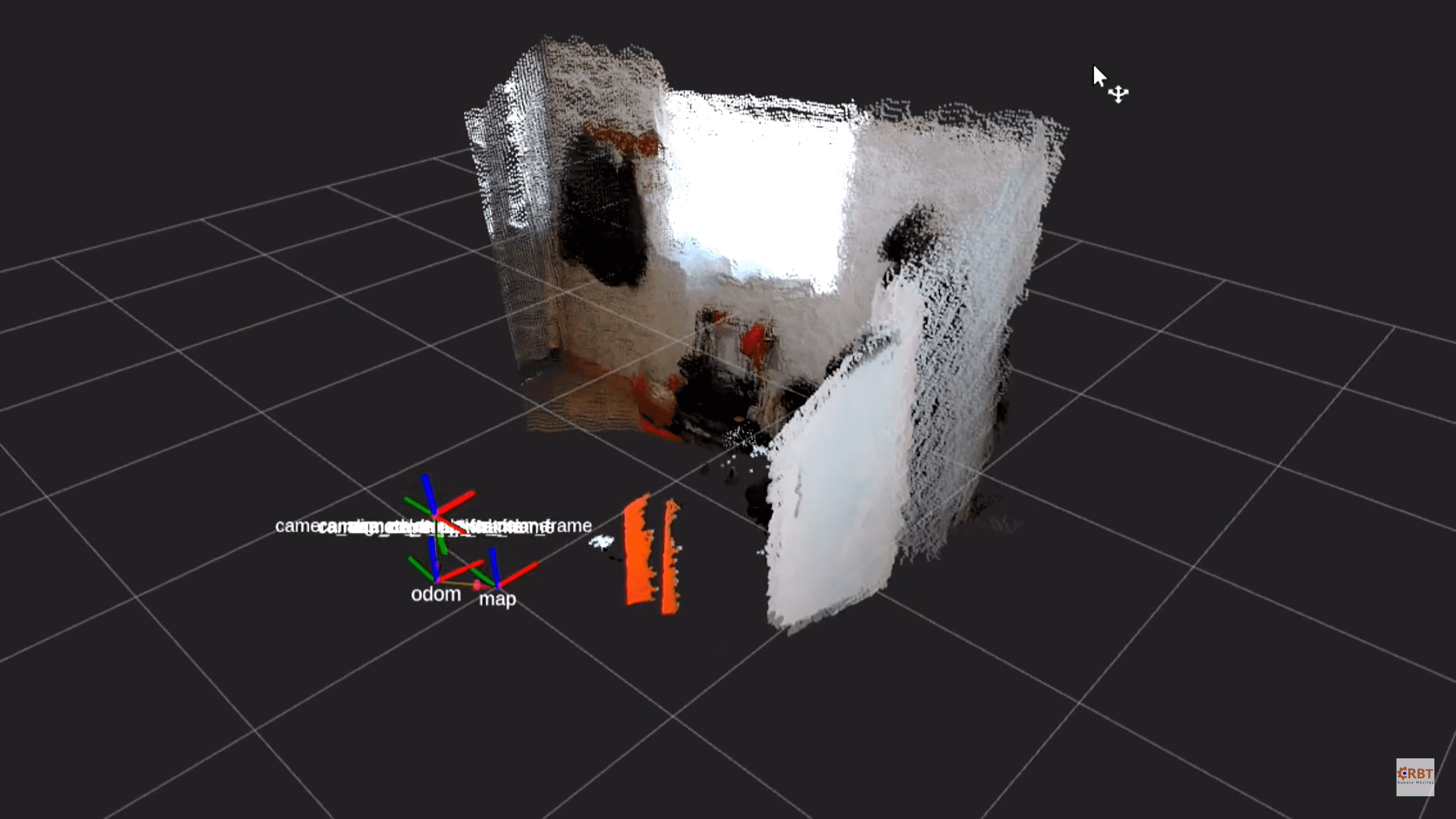
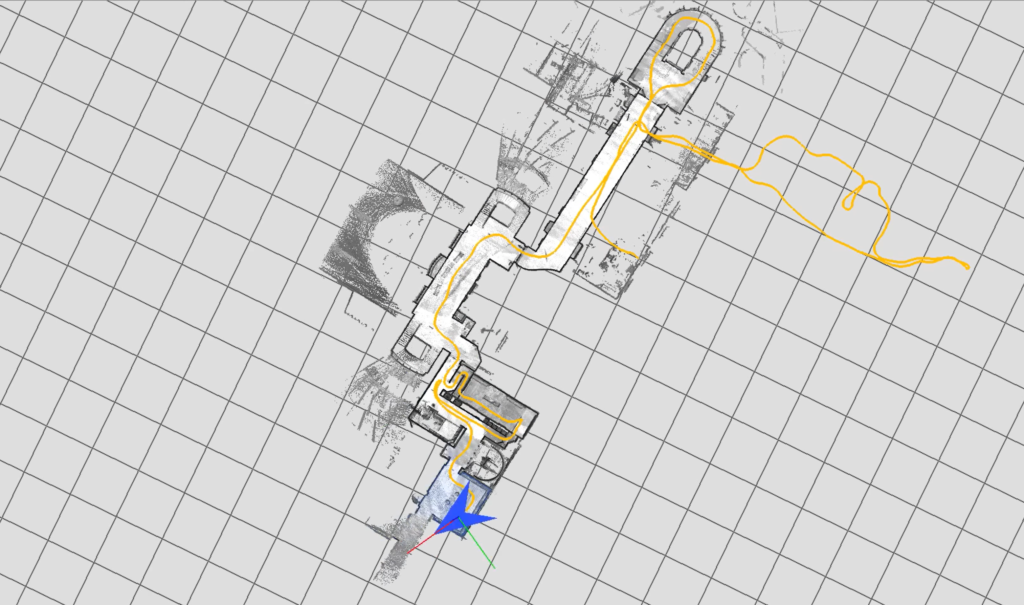
2. RTAB-MAP+ LiDAR 2D: Equilibrio entre Precisión y Costo RTAB-MAP(Real-Time Appearance-Based Mapping) combinado con LiDAR 2D ofrece un buen equilibrio entre precisión y costo. Esta tecnología utiliza cámaras para capturar características visuales del entorno y las combina con los datos de un LiDAR 2D, creando un mapa robusto y preciso. Ventajas: Precisión Moderada-Alta: Ofrece un nivel de precisión adecuado para muchos entornos interiores. Costo Más Accesible: Aunque sigue siendo moderadamente costoso, es más asequible que el LiDAR 3D. Desventajas: Dependencia Visual: La precisión depende de la cantidad y calidad de las características visuales disponibles. Costo de Integración: La combinación de múltiples tecnologías puede incrementar los costos. Mantenimiento de Cámaras: Las cámaras requieren limpieza y mantenimiento regular. Casos de Uso: Entornos interiores con características visuales suficientes, como fábricas y almacenes.
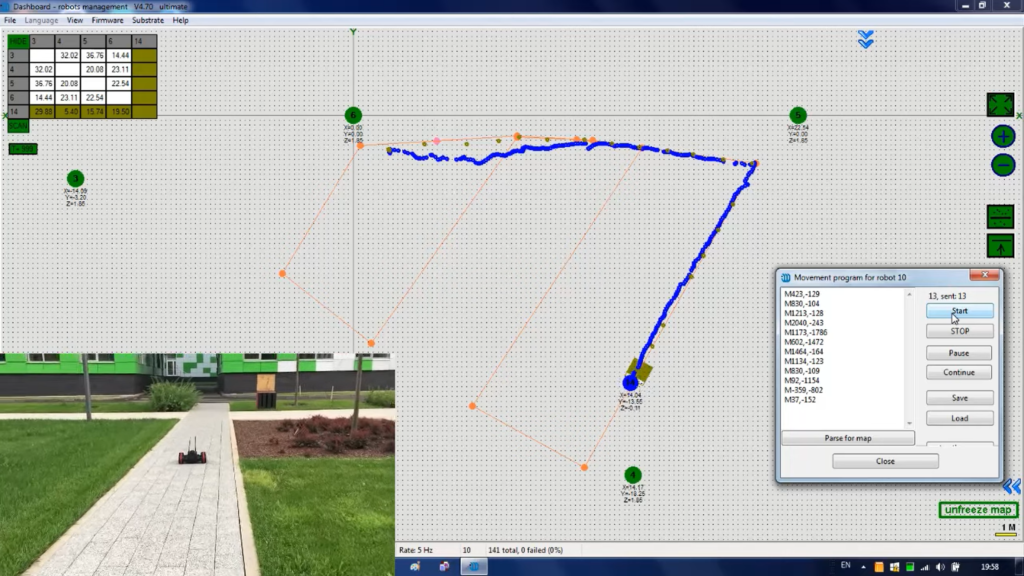
3. Beacons GPS Indoor: Simplicidad y Costo Bajo Los Beacons GPS indoor ofrecen una solución sencilla y económica para la navegación de robots en interiores. Estos sistemas utilizan balizas distribuidas en el entorno para ayudar a los robots a determinar su posición. Ventajas: Simplicidad: Fácil de instalar y mantener, con una tecnología accesible. Costo Bajo a Moderado: Dependiendo de la cantidad de beacons necesarios. Desventajas: Menor Precisión: En comparación con SLAM, la precisión es generalmente inferior. Necesidad de Instalación Fija: Requiere la instalación de beacons en el entorno, lo que puede limitar la flexibilidad. Interferencias: Las señales pueden ser afectadas por obstáculos o interferencias electromagnéticas. Casos de Uso: Tiendas, pequeñas fábricas y otros entornos interiores bien definidos.
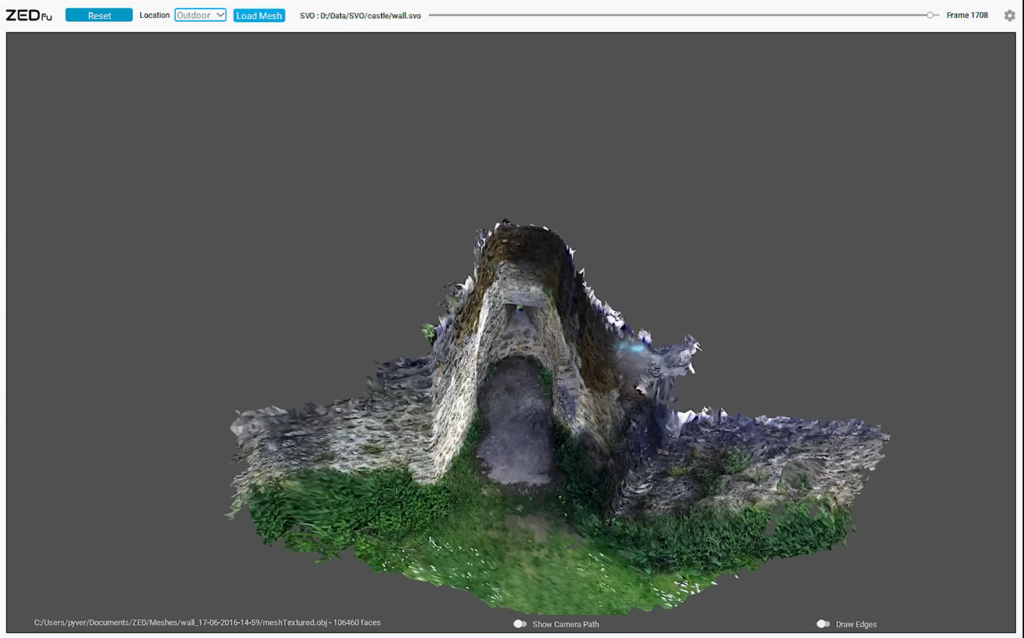
4. SLAM con Visión Estéreo: Precisión Visual en Entornos Ricos en Textura El SLAM con visión estéreo utiliza cámaras estéreo para generar mapas 3D del entorno, ofreciendo una alternativa más económica al LiDAR 3D, pero con ciertas limitaciones en cuanto a iluminación y homogeneidad del entorno. Ventajas: Precisión Moderada-Alta: Puede generar mapas precisos en entornos con muchas características visuales. Costo Moderado: Es más económico que LiDAR 3D. Desventajas: Sensibilidad a la Iluminación: La calidad de la navegación puede disminuir en condiciones de poca luz. Mayor Procesamiento: Requiere una capacidad computacional considerable. Menor Precisión en Entornos Homogéneos: En áreas con pocas características visuales, la precisión puede verse afectada. Casos de Uso: Entornos con características visuales ricas, como áreas con muchas texturas o características visuales.
5. Cinta Magnética: Simplicidad con Limitaciones de Flexibilidad La navegación mediante cinta magnética es una de las tecnologías más simples y económicas para la navegación de robots móviles. Consiste en la colocación de cintas magnéticas en el suelo, que los robots siguen para moverse a lo largo de una ruta predefinida. Ventajas: Simplicidad: Fácil de instalar y operar. Costo Bajo: Dependiendo del tamaño del área y la complejidad de la ruta. Desventajas: Flexibilidad Limitada: Los robots están restringidos a las rutas donde se coloca la cinta magnética. Mantenimiento de la Ruta: La cinta magnética puede requerir mantenimiento o reemplazo frecuente. Inadecuado para Entornos Dinámicos: No es adecuado para entornos donde se requieren cambios frecuentes en la ruta. Casos de Uso: Almacenes, fábricas y otros entornos donde las rutas son fijas y no necesitan cambios frecuentes.
6. Códigos QR 2D: Navegación Basada en Marcadores La navegación con códigos QR 2D utiliza códigos QR colocados en el suelo o en paredes como puntos de referencia para que los robots determinen su posición y trayectoria. Ventajas: Precisión Moderada: Los códigos QR proporcionan una referencia fiable para la navegación. Costo Bajo: Dependiendo de la cantidad de códigos y el tamaño del área. Desventajas: Dependencia de la Visibilidad: Los códigos deben estar claramente visibles para las cámaras del robot. Mantenimiento de Marcadores: Los códigos QR pueden necesitar mantenimiento o reemplazo si se deterioran. Limitaciones en Grandes Áreas: La instalación y mantenimiento de códigos QR en áreas grandes puede ser costoso y laborioso. Casos de Uso: Almacenes y fábricas con rutas predefinidas y bien mantenidas.
7. SLAM con LiDAR 2D: Precisión con Menor Costo SLAM con LiDAR 2D utiliza un sensor LiDAR 2D para mapear el entorno en dos dimensiones, proporcionando una solución de navegación precisa, aunque con menor detalle que el LiDAR 3D. Ventajas: Costo Moderado: Es más económico que el LiDAR 3D. Precisión Adecuada: Proporciona una precisión suficiente para muchos entornos interiores. Desventajas: Menor Detalle: Al ser 2D, el mapa generado es menos detallado que con LiDAR 3D. Dependencia de la Altura Fija: El sensor LiDAR 2D solo captura datos en un plano horizontal fijo. Casos de Uso: Almacenes, fábricas y otros entornos interiores con necesidades de navegación precisas pero con un presupuesto más limitado.
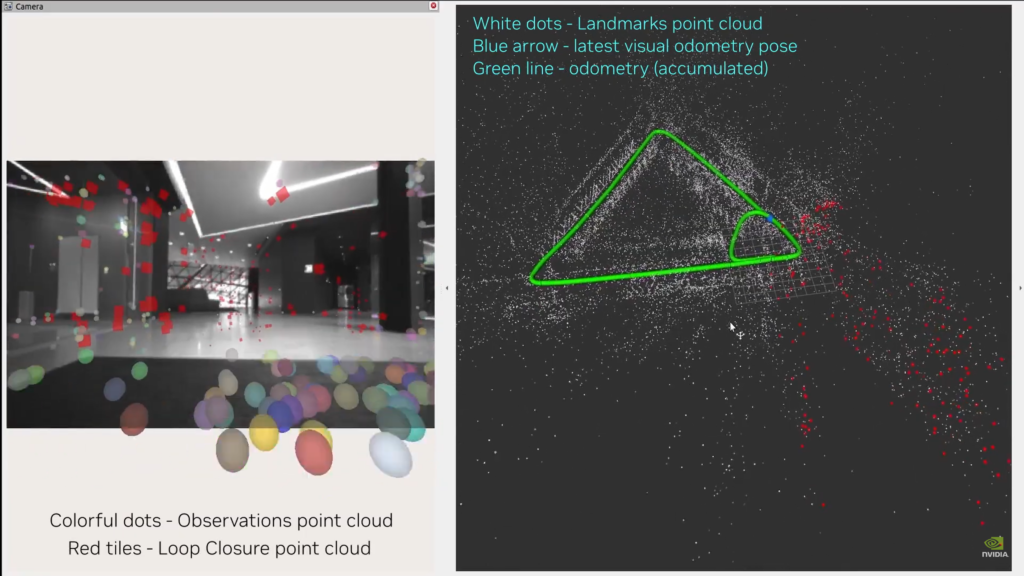
8. VSLAM: Navegación Basada en Visión con Flexibilidad VSLAM (Visual Simultaneous Localization and Mapping) se basa únicamente en cámaras para mapear el entorno y navegar. Es una opción flexible que no requiere de sensores adicionales como LiDAR. Ventajas:
Costo Moderado: Dependiendo de las cámaras y el sistema de procesamiento. Alta Flexibilidad: Adecuado para una amplia variedad de entornos y no requiere infraestructura fija. Desventajas:
Dependencia de la Iluminación: La calidad de la navegación puede verse afectada en condiciones de baja luz. Mayor Complejidad Computacional: Requiere un procesamiento intensivo de imágenes. Casos de Uso: Entornos variados con características visuales ricas, como almacenes y áreas comerciales.
Costo elevado, procesamiento complejo, afectado por el entorno
VSLAM + LiDAR 2D
Moderada-Alta
Moderada
Moderado-Alto
LiDAR 2D, cámaras, sistema de procesamiento
Dependencia visual, integración costosa, mantenimiento de cámaras
Beacons GPS Indoor
Moderada
Baja
Bajo-Moderado
Beacons, receptores
Menor precisión, instalación fija, interferencias
SLAM con Visión Estéreo
Moderada-Alta
Moderada-Alta
Moderado
Cámaras estéreo, sistema de procesamiento visual
Sensibilidad a la iluminación, procesamiento intensivo, menor precisión en entornos homogéneos
Cinta Magnética
Baja
Baja
Bajo
Cinta magnética, sensores de seguimiento
Flexibilidad limitada, mantenimiento frecuente, no apto para entornos dinámicos
Códigos QR 2D
Moderada
Baja
Bajo
Cámaras, códigos QR
Dependencia de la visibilidad, mantenimiento de marcadores, limitaciones en áreas grandes
SLAM con LiDAR 2D
Moderada-Alta
Moderada
Moderado
LiDAR 2D, unidad de procesamiento
Menor detalle que LiDAR 3D, dependencia de altura fija
VSLAM
Moderada-Alta
Moderada-Alta
Moderado
Cámaras, sistema de procesamiento visual
Dependencia de la iluminación, complejidad computacional
Tabla comparativa de tecnologías de navegación
Conclusión: ¿Cuál es la Mejor Tecnología para Ti?
La elección de la tecnología de navegación adecuada depende de varios factores, incluyendo el entorno en el que operará el robot, los requisitos de precisión, el presupuesto disponible y la complejidad que estás dispuesto a manejar. SLAM con LiDAR 3D es ideal para aplicaciones que requieren máxima precisión en entornos complejos. VSLAM + LiDAR 2D ofrece un equilibrio entre precisión y costo, adecuado para aplicaciones en interiores. Beacons GPS Indoor es la opción más sencilla y económica para entornos bien definidos. SLAM con Visión Estéreo es útil en entornos ricos en características visuales. Cinta Magnética es adecuada para entornos con rutas fijas y donde la simplicidad es clave. Códigos QR 2D funcionan bien en entornos con rutas predefinidas y bien mantenidas. SLAM con LiDAR 2D proporciona una solución de navegación precisa a un costo más accesible. VSLAM es una opción flexible para entornos variados, especialmente cuando no se requiere infraestructura fija. Evalúa cuidadosamente tus necesidades y selecciona la tecnología que mejor se adapte a tu proyecto para garantizar el éxito y la eficiencia en la navegación de tus robots móviles.




Gran aportación, muchas gracias